")
Fuente de alimentación de un laser
18 diciembre, 2008

Estamos comenzando a reparar unas nuevas fuentes de alimentación.
En este caso son un poco especiales ya que se trata de unas fuentes de alimentación de un Láser.
Estamos empezando analizarlas, documentarlas y estudiarlas.

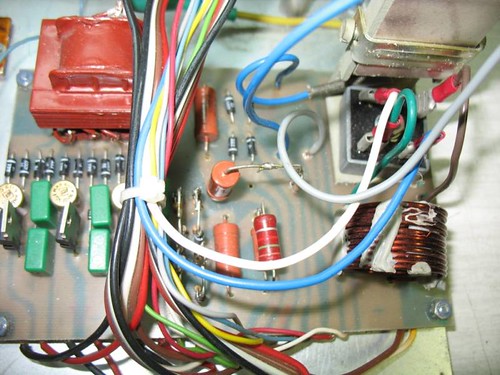
Imagen de los semiconductores de potencia de las unidades de regulación conmutada y su disipador.
Pueden generar tensiones de salida desde 100V a 900V y 4,3Kjulios.
La fuente carga unos condensadores que suministran la energía para los pulsos Láser.
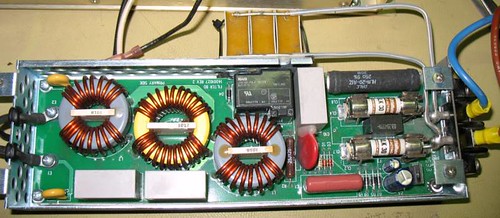
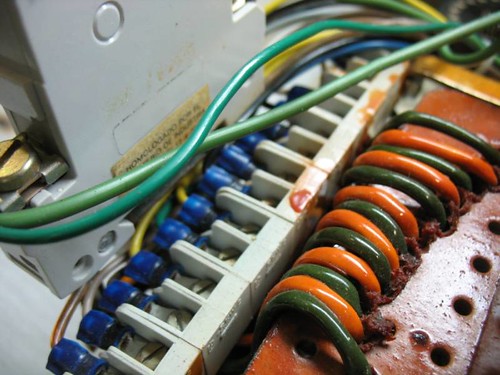
Filtro de red y sección de fusibles.
Las fuentes están compuestas por varias secciones de fuentes conmutadas algunas de ellas en alta frecuencia por el tipo de trasformadores.
Para evitar interferencias y perturbaciones disponen de un completo filtro de entrada y un sistema para supervisar la tensión de entrada de red.

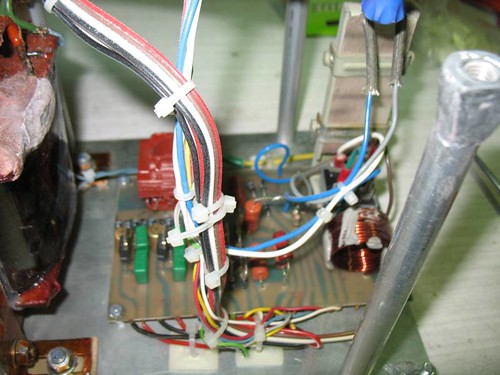
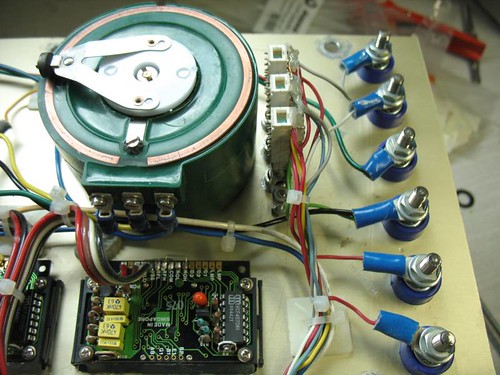
Imagen de los transformadores de salida y los condensadores de filtrado de las fuentes primarias.
La fuente puede llagar a consumir 22A de la entrada de red lo que se podría aproximar a unos 5KW.

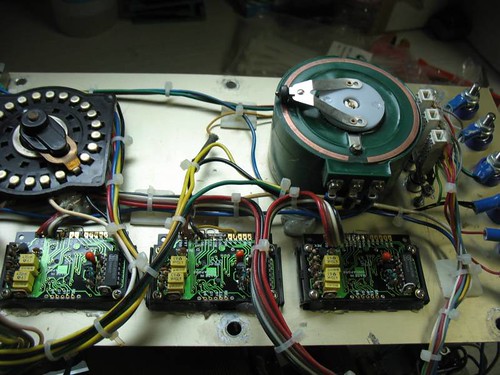
Imagen de la placa de control digital, a la derecha y del multiplicador de la tensión de salida a la izquierda.
Todo el proceso de regulación y control se realiza de manera digital.

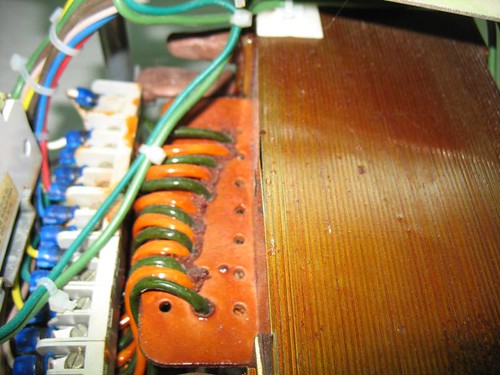
Transformador que excita el multiplicador de salida.
La tensión de salida se consigue mediante un circuito multiplicador de tensión.

La fuente esta montada en un robusto chasis y dispone de un generoso ventilador para la refrigeración forzada.
Ya os iremos informando de los progresos en la reparación de estas fuentes, con mas imagenes.
< Imágenes Electronica Pascual >
Publicado en Mantenimiento | No hay comentarios »