Unos días antes de su salida desde Madrid hacia su gran aventura.
Después de un viaje de 2 años por tierras africanas de nuestros amigos Isabel y Carmelo, fundadores de CineCicleta. Ruta de CineCicleta.
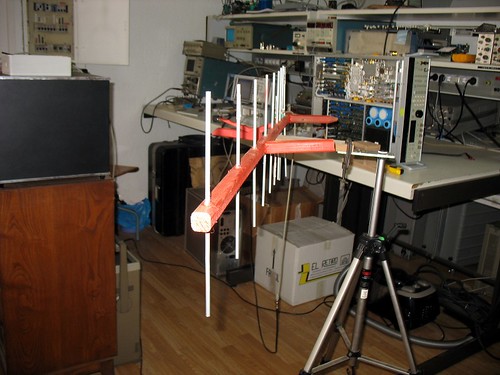
Queremos recuperar algunas imágenes que tomamos en nuestro laboratorio durante el proceso de ajuste y preparación del equipo de cine con generador eléctrico a pedales.
Solucionamos varios problemas que presentaba el sistema original :
– Saturación del audio con algunas películas.
– Ruido de fondo en el audio producido por la fuente conmutada del proyector.
Como el viaje era largo y por zonas donde los repuestos y el soporte técnico era dificil, preparamos el equipo para una dura travesía.
– Se re coloco y fijo el cableado.
– Se sellaron todas las juntas de la caja para evitar la entrada de arena y humedad.
Y por supuesto probamos el proyector.
Dando nuestro toque personal al equipo :
– Se instalo una toma para poder usar el proyector de manera independiente, sin el centro multimedia,ajustando y colocando una entrada de audio.
– Prolongamos la alimentación del proyector para poder situarlo en un trípode.
Por el resultado, parece que Isabel y Carmelo quedaron muy contentos.
CanSat (European CanSat Competition) es un bonito proyecto de la Agencia Espacial Europea ESA en el que participan por equipos, los años alumnos de secundaria de todos los países europeos.
Se trata de construir en el espacio de una lata de refresco un sistema que realice diversas medidas ambientales; Este sistema se lanza con la ayuda de un cohete lanzador que es proporcionado por la ESA a .una altura de unos 2.000 metros.
Las medidas y la telemetría se almacena en el sistema y a la vez es retransmitida vía radio siendo captada mediante una antena direccional por los miembros del equipo.
Conocí a los miembros de uno de los dos equipos españoles seleccionados en este año 2015 en el Mini Makers Faire
Se celebro en MediaLab Prado, les ofrecí nuestras instalaciones, nuestros equipos de medida de radio frecuencia y nuestros conocimientos.
Nuestra colaboración con el equipo del colegio Retamar cuyo equipo tiene el nombre de Rosetta CanSat Team se centro en el sistema de antena direccional para la recepción de los datos de telemetría.
En primer lugar les aconsejamos cambiar el acoplamiento entre la antena y el cable coaxial que lleva la señal al receptor.
Un sistema bien acoplado es fundamental para tener la mínima perdida de señal y aun mas importante cuando las señales a recibir son de muy baja intensidad.
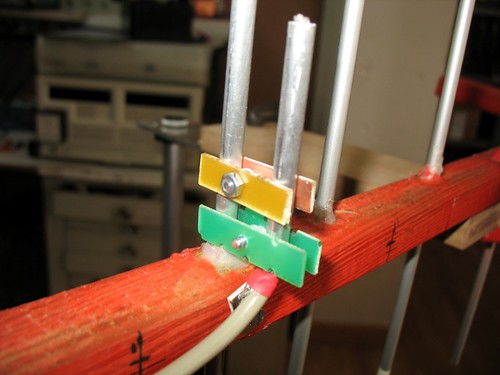
Les recomendamos un acoplamiento en Gamma, se sustituyo el elemento radiante y se mecanizaron los distintos elementos.
La malla del cable coaxial esta conectada al centro del elemento radiante que tiene un nulo de tensión, el vivo se introduce por el interior de la barrilla de acoplamiento Gamma.
Esto hace que se forme un condensador variable que compensa la reactancia del acoplamiento Gamma independientemente de la longitud del ajuste.
La parte inferior esta formado por dos laminas de fibra de vidrio y es un simple soporte mecánico.
El sistema deslizante se hace con dos secciones de placa de circuito impreso.
Una vez ajustado se fija para evitar desajustes.
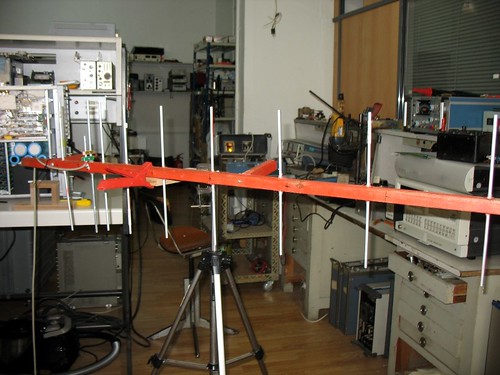
Ajuste de la antena
Para los ajustes de la antena usamos:
Un analizador de comunicaciones Rohde & Schwarz CMU200
Un Directional Power Mater Rohde & Schwar NAS con un puente de medida hasta 1000Mhz
Una Antena biconica con un rango de 80Mhz a 4Ghz.
Un amplificador de potencia de 1W en el rango de 470Mhz.
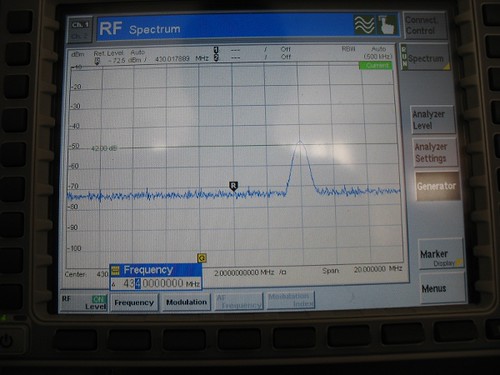
En primer lugar buscamos el mejor factor de acoplamiento del Gamma.
Para ello, inyectamos una señal de radio frecuencia en 470Mhz en la antena con una potencia de 1w y medimos la relación de ondas estacionarias con el acoplador direccional Nas.
Desplazamos el acoplamiento Gamma hasta obtener el índice mas bajo de potencia reflejada.
Como en cualquier sistema radiante si esta acoplado para la transmisión también lo estará en recepción.
Para probar la direccionalidad de la antena:
Aplicamos una señal en el centro de la banda de recepción a una antena biconica que es utilizada como elemento de radiación de referencia.
Girando la antena Yagi, se toman valores con el analizador de comunicaciones, se traza el gráfico de direccionalidad de campo cercano ya que las medidas se realizaron en el interior del laboratorio.
Por ultimo una fotografía de los miembros del Rosetta CanSat Teamm con su antena ajustada y lista para recibir las señales del lanzamiento.
Os dejamos con un vídeo del equipo que les hizo la televisión y al final de la entrada algunos enlaces interesantes de este fabulosos proyecto de la ESA.
http://www.equipcodes.com/arAugmented Reality aplicación proporciona a pie, aunque construir instrucciones, parte y superposiciones de información neta en el circuito real.http://www.equipcodes.com/ar
Augmented Reality aplicación proporciona a pie, aunque construir instrucciones, parte y superposiciones de información neta en el circuito real.
Asterisk es un robot diseñado en un laboratorio de la universidad japonesa de Osaka
Asterisk tiene seis miembros.
El diseño simétrico de la parte superior e inferior del robot de modo que no hay distinción entre el área de trabajo en la parte superior e inferior del cuerpo.
Por lo tanto, es posible moverse en cualquier dirección sin alteración de la postura, levantar un objeto, y volver fácilmente a su posición normal después de caer hasta boca abajo.
Asterisk tiene los siguientes seis tipos de sensores:
Sensores de presión en las puntas de todos los miembros, que puede detectar si están siendo empujado o tirado.
Los sensores infrarrojos en los extremos de tres de los miembros.
Un sensor giroscópico y un sensor de aceleración en el cuerpo.
Cámaras inalámbricas en las puntas de tres miembros y tres cámaras CCD en el cuerpo.
El movimiento se realiza mediante el uso de la disposición de la pierna isotrópico y el centro dinámico de control de masas inspirado en los robots bípedos.
Reconocimiento de una escalera
Mediante escaneo laser en 2D y 3D disponiendo de un telemetro.
Después que el robot reconoce una escalera, automáticamente se encamina hacia la escalera y subir calcula la estabilidad del cuerpo y la pierna (s) en el área de trabajo en todo momento.
Y muchas mas posibilidades:
Capacidad de transportar objetos.
Sistema de red de sensores RFID
Un método de evitación de obstáculos mediante la detección de la colisión.
Locomoción híbrida de ASTERISK pierna con ruedas.
Podéis encontrar más información en la pagina web del proyecto:

")

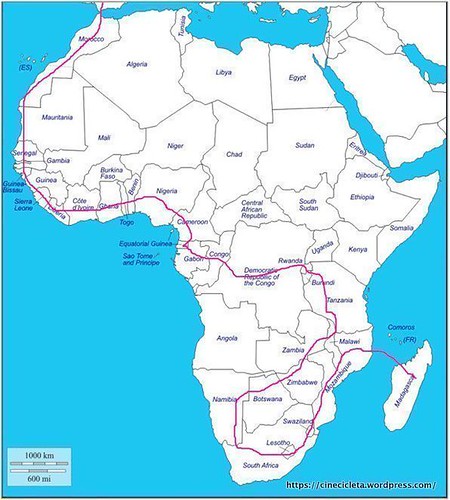 Ruta de CineCicleta.
Ruta de CineCicleta.





 direccionalidad de campo cercano
direccionalidad de campo cercano